# build
# ---------------------------------
i grabbed a block of wood and drilled two holes through either side of the wood — slightly larger than the two dowels that i was using as tire axles. i then put the axles through the holes and attached the wheels to either end using the small screw that came with the wheels.

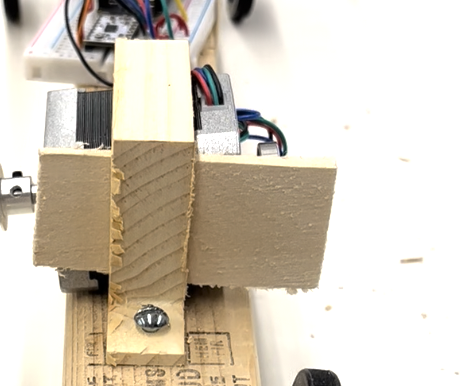
i then had to make some sort of bracket that could secure the stepper motor to the top of the car rigidly enough for it to maintain tension between it and the axles. i decided to use the shopbot to mill a small bracket piece

i then screwed the bracket onto the car, put the motor inside, and used a wood shim to make it fit snugly

the next (and most difficult) step was connecting the motor to the tire axis. my original plan was to use rubber bands, like in this example that i found:

this did not work particularly well, likely because the circumference of the axles (i.e. the amount of surface area the rubber band has to grip onto the axle and exert torque) was smaller in my car than in this video example
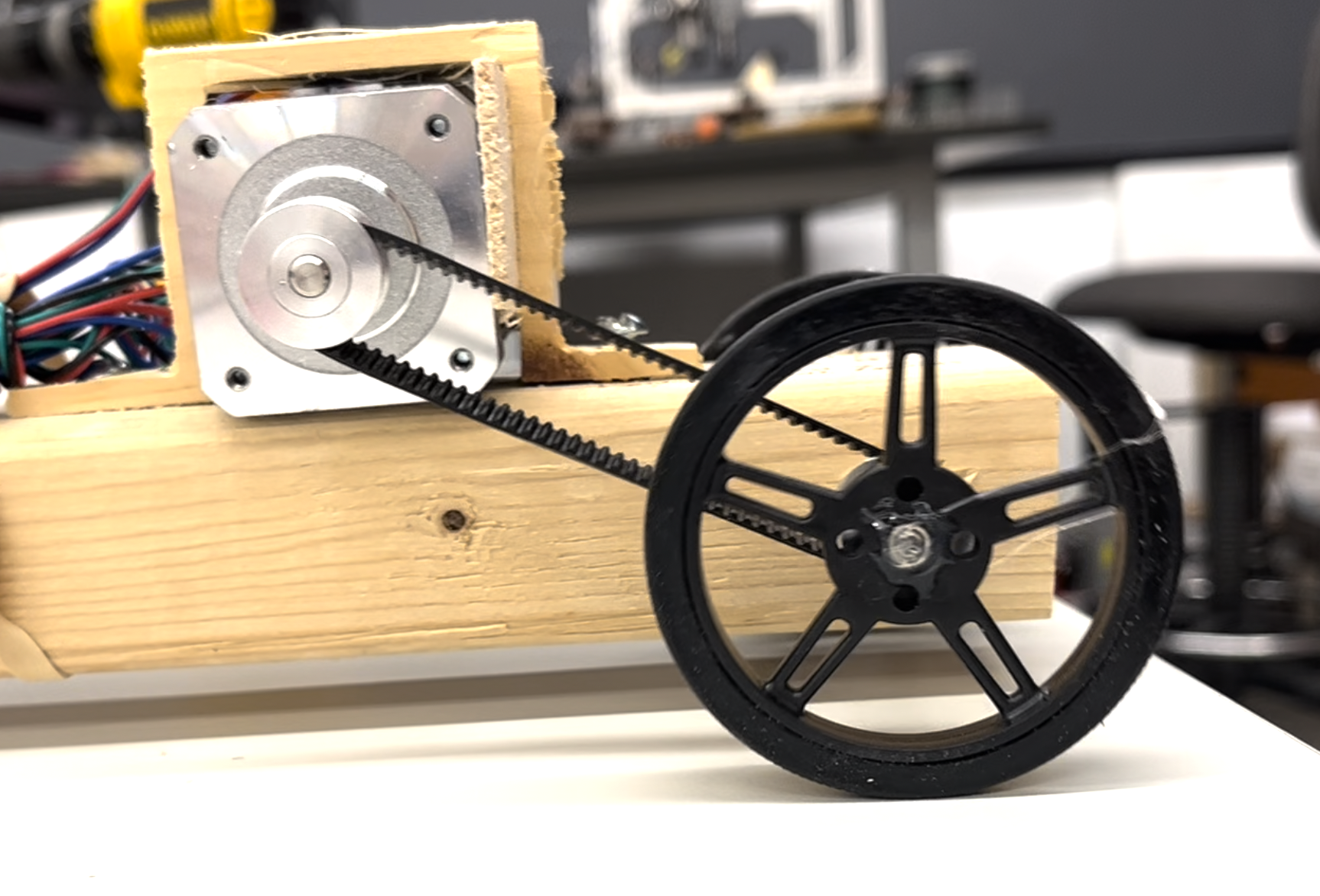
i instead decided to use the timing bands. because the only closed loop timing band i could find was fairly small, i had to move the motor to the back side of the car, and was only able to connect it to one of the two axles.